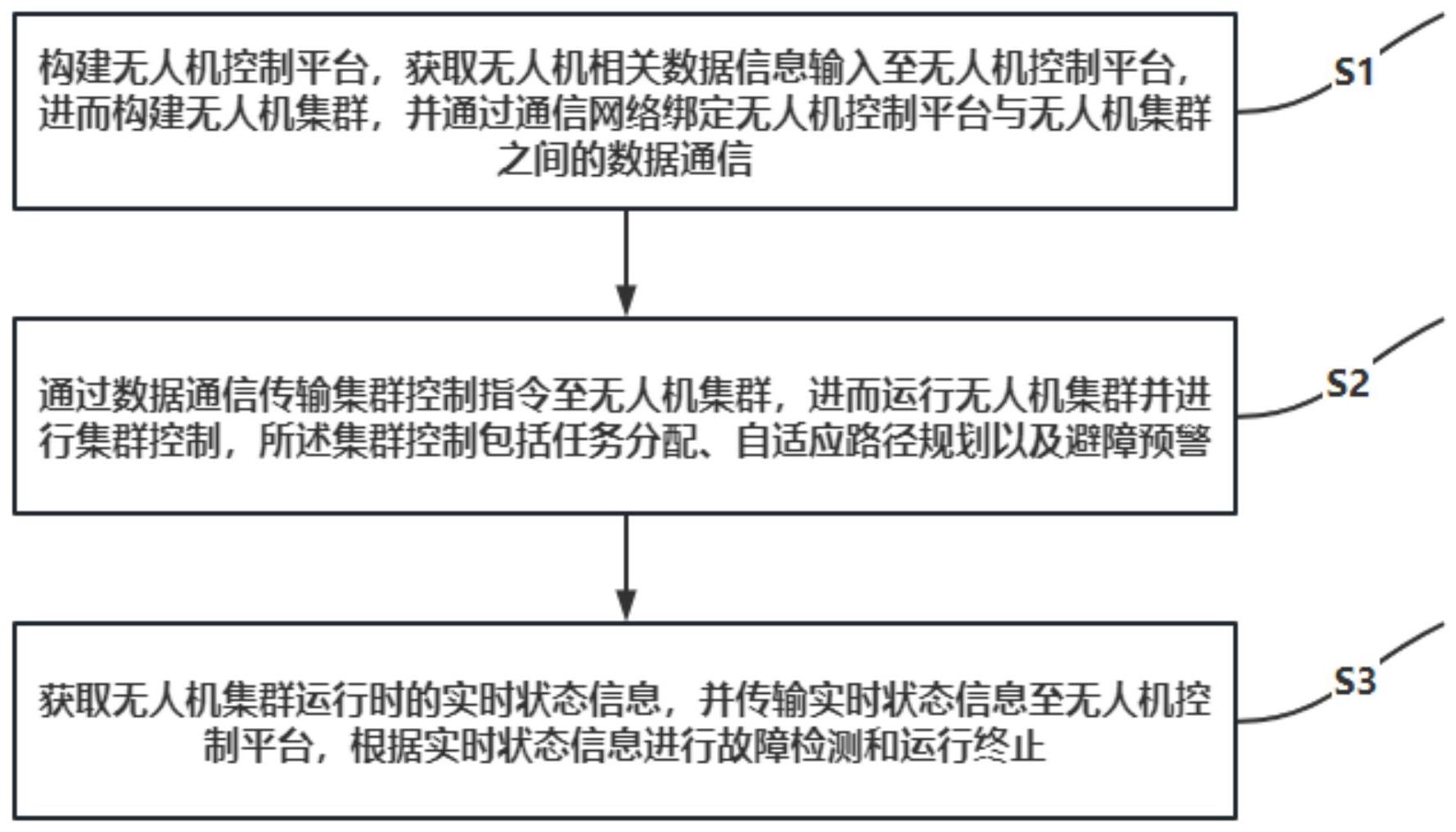
本发明公开了一种基于计算机的无人机方阵控制方法,涉及了无人机控制技术领域,构建无人机控制平台,获取无人机相关数据信息输入至无人机控制平台,进而构建无人机集群,并通过通信网络绑定无人机控制平台与无人机集群之间的数据通信;通过数据通信传输集群控制指令至无人机集群,进而运行无人机集群并进行集群控制,所述集群控制包括任务分配、自适应路径规划以及避障预警;获取无人机集群运行时的实时状态信息,并传输实时状态信息至无人机控制平台,根据实时状态信息进行故障检测和运行终止,从而,实现了对无人机方阵的高效控制。